

5.6 Discovering consecutive multi-shape segments
We have already implemented a method for discovering single-shape curve segments. Sometimes, we also need to discover composite shapes where two or more shapes appear consecutively, such as a curve that first falls then stabilizes, or one that first rises, stabilizes, and then falls, and so on.
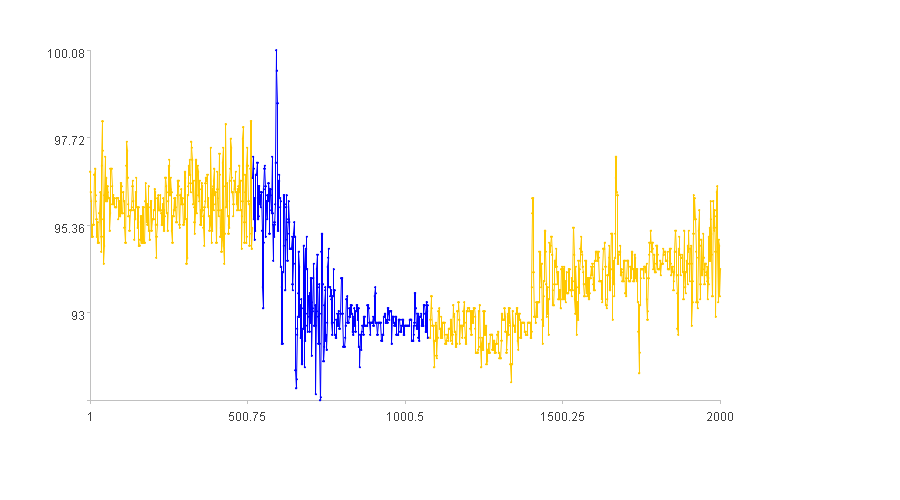
Using the previous time series, let’s find the curve segments that first fall then stabilize. The blue curves in the figure below indicate the approximate locations of these segments.
Now let’s describe how to discover consecutive multi-shape curve segments:
1. Find the curve segment indices for each shape using the single-shape curve segment discovery method:
Id(1)=H(arg1)=[Id(1)(1), Id(1) (2),…, Id(1) (p1)]
Id(2)=H(arg2)=[Id(2)(1), Id(2) (2),…, Id(2) (p2)]
…
Id(k)=H(argk)=[Id(k)(1), Id(k) (2),…, Id(k) (pk)]
Ids=[ Id(1)(1), Id(1) (2),…, Id(1) (p1), Id(2) (1),…, Id(2) (p2),…, Id(k)(1),…, Id(k) (pk)]
Where Id(i) is the index set of the i-th shape, Id(i) (j) is the j-th segment of Id(i), H(…) is the function for discovering single-shape curve segments, and argi is the parameter for the i-th shape.
2. Sort Ids by index. Let Idst denote the sorted results:
Idst=Ids.sort(~(1))
Where Idst is the index set sorted based on the first element of each Id(i) (j).
3. Find consecutive shape indices in Idst that match the desired shape order and are not too far apart. Let Idst’ denote the found indices:
Idst’1=[Id(1)(s1), Id(2)(t1),…, Id(k)(u1)]
Idst’2=[Id(1)(s2), Id(2)(t2),…, Id(k)(u2)]
…
Idst’v=[Id(1)(s2), Id(2)(t2),…, Id(k)(u2)]
Where Idst’i is the index set of the i-th consecutive shape curve segment. Each segment is the index set of k shapes, and the indices of adjacent shapes are not too far apart. That is, the last index of one shape and the first index of the next shape are close. Taking the index set of the first consecutive shape segment as an example:
Id(2)(t1)(1)-Id(1)(s1)(-1)<ε
Id(2)(t1)(1) is the first index of the t1-th segment of the second shape, Id(1)(s1).m(-1) is the last index of the s1-th segment of the first shape, and ε is a relatively small value that can be used as a parameter to ensure that the two shapes are adjacent on the time series X.
4. Extract time series data based on the consecutive shape indices
Since the indices of consecutive shapes are expected to be sequential, the index range for the consecutive shape curve segment is defined from the first index of the first shape to the last index of the k-th shape:
spi=X(to(Id(1)(si)(1), Id(k)(ui).m(-1)))
spi is the i-th segment of consecutive shape, Id(1)(si)(1) is the first index of the i-th segment of the first shape, and Id(k)(ui).m(-1) is the last index of the i-th segment of the k-th shape.
SPL routine:
The time series data remains unchanged. Discover the curve segments that first fall then stabilize.
We need to fit the main line M and calculate the rise/fall index L.
Parameter settings:
Let K’ denote the observation level:
K’=600
Two sets of parameters are required for the two shapes:
Let Nm1 denote the combination of falling segment feature index names:
Nm1=[“L”]
Let Nm2 denote the combination of stable segment feature index names:
Nm2=[“L”]
Let Ag1 denote the value range of the falling segment:
Ag1=[[-1,-0.1]]
Let Ag2 denote the value range of the stable segment:
Ag2=[[-0.1,0.1]]
Let dut1~ ~denote the shape length range of the falling segment:
dut1=[100,10000]
Let dut2 denote the shape length range of the stable segment:
dut2=[100,10000]
Let ε denote the interval between two segments:
ε=180
SPL routine:
| A | B | |
|---|---|---|
| 1 | =file(“1Ddata.csv”).import@tc() | /Table sequence containing time series X |
| 2 | 600 | /K’ |
| 3 | [L] | /Nm1 |
| 4 | [[-1,-0.1]] | /Ag1 |
| 5 | [100,10000] | /dut1 |
| 6 | [L] | /Nm2 |
| 7 | [[-0.1,0.1]] | /Ag2 |
| 8 | [100,10000] | /dut2 |
| 9 | 180 | /ε |
| 10 | =A1.(Value) | /Time series X |
| 11 | =2*power(4,lg(A2/15,2)-1) | /Balancing coefficient K |
| 12 | =fit_main(A10,A11) | /Main line M |
| 13 | =A2/40 | /Index interval k |
| 14 | =Lift(A12,A13) | Rise-fall index L |
| 15 | =[A14.min(),A14.max()] | /Min & max of L |
| 16 | =[A15] | /Min & max of feature index |
| 17 | =A1.derive(A14(#):L) | /Table sequence T |
| 18 | =A4.((idx=#,~.(arg_throw(~,A16(idx)(2),A16(idx)(1))))) | //Falling segment parameter projection |
| 19 | =A3.(~/“>=”/“number(”/$[A18(]/#/$[)(1)]/“)”/“&&”/~/“<=”/“number(”/$[A18(]/#/$[)(2)]/“)”).concat(“&&”) | /Falling segment filtering criteria |
| 20 | =A17.pselect@a(eval(A19)) | |
| 21 | =A20.group@u(~-#) | |
| 22 | =A21.select(~.len()>=A5(1)&&~.len()<=A5(2)) | /Falling segment index combination Id(1) |
| 23 | =A7.((idx=#,~.(arg_throw(~,A16(idx)(2),A16(idx)(1))))) | /Stable segment parameter projection |
| 24 | =A6.(~/“>=”/“number(”/$[A23(]/#/$[)(1)]/“)”/“&&”/~/“<=”/“number(”/$[A23(]/#/$[)(2)]/“)”).concat(“&&”) | /Stable segment filtering criteria |
| 25 | =A17.pselect@a(eval(A24)) | |
| 26 | =A25.group@u(~-#) | |
| 27 | =A26.select(~.len()>=A8(1)&&~.len()<=A8(2)) | /Stable segment index combination Id(2) |
| 28 | =[A22,A27] | /Ids |
| 29 | =A28.conj((idx=#,~.new(~:seq,idx:seq_idx))) | /Indices of curve segments with different shapes |
| 30 | =A29.sort(seq) | /Sorted Idst |
| 31 | =A30.group@u(seq_idx-#) | /Adjacent grouping |
| 32 | =A31.select(~.len()==A28.len()&&(ss=~.(seq),ss(2)(1)-ss(1).m(-1)<=A9)) | /Filter Idst’ for groups with sufficiently small intervals |
| 33 | =A32.((sq=~.(seq).conj(),to(sq.~,sq.m(-1)))) | /Curve segments meeting the requirements |
| 34 | =A33.(A10(~)) | /Specified shape Sp |
Calculation result example:
The discovered consecutive shapes meet expectations.
SPL Official Website 👉 https://www.esproc.com
SPL Feedback and Help 👉 https://www.reddit.com/r/esProcSPL
SPL Learning Material 👉 https://c.esproc.com
SPL Source Code and Package 👉 https://github.com/SPLWare/esProc
Discord 👉 https://discord.gg/sxd59A8F2W
Youtube 👉 https://www.youtube.com/@esProc_SPL

